- Technologie
- Spiritualité
- Science
- Médecine
- Alchimie
- Culture
- Education
- Environnement
- Agriculture
- Industrie
- Social
- Histoire
- Personnes d'exception
Le Moteur Magnétique
Par Fulmina Institut
Présentée par Fulmina Institut et PROOF GLOBAL CORPORATION par David Brooks Nixon, Président du Conseil Dr. Robert Abraham Hallowitz, Directeur Exécutif VENTURI LLC Richard Keith Wood, Président Denis L. Palmer, Inventeur, Ingénieur en chef.
Juillet 2017
Une technologie d’énergie libre
Préambule
Nous présentons dans ce mémoire, un exemple de production d’Énergie Libre, qui incorpore une série de caractéristiques très pratiques et représente un bond en avant dans le domaine de l’efficacité énergétique.
Cet appareil résout plusieurs situations où la disponibilité et le coût de l’énergie constituent la partie la plus onéreuse de la solution. Comme par exemple, la désalinisation de l’eau de mer, la croissance agricole, les groupes motopropulseurs d’automobiles, d’avions et de bateaux, les hauts-fourneaux. La liste des applications quotidiennes ne fait que grandir. Un brevet américain portant le numéro US 2012/0326541 A1, a été accordé.
Ce mémoire a été préparé par les scientifiques associés à PROOF GLOBAL CORP.; il a été soumis pour analyse, à l’Académie de la Fondation Fulmina Human Resources. La Fondation Fulmina H.R. a obtenu une licence de distribution prioritaire pour ses projets humanitaires environnementaux et ses projets humanitaires d’urgence.
Résumé
Cette invention présente un moteur électrique particulièrement efficace, comprenant un moteur standard, un moteur central (hub motor), un moteur linéaire, ainsi que d’autres configurations de moteur. En tant qu’appareil de génération électrique, le moteur peut être utilisé à la fois en configuration « génération plein temps » ou « mi-temps ». Le moteur comprend un stator et un l’arbre de transmission (rotor). Le stator dispose d’un ensemble de bobines configurées spécifiquement. L’arbre de transmission (rotor) dispose d’un ensemble d’aimants disposés spécifiquement. Chaque bobine comprend un enroulement d’un fil de métal autour d’un cœur, le fil de métal non circulaire mais plat.
Extrait du Brevet d'application
Introduction
Le brevet MagnetronicTM, apporte une conception de moteurs générateurs d’énergie au cœur du 21ème siècle. Magnetronic est le seul concept de générateur modulaire qui permet un arrangement radial de bobines et d’aimants, qui en mouvement de rotation, produit plus d’énergie inductive propre – et la bonne nouvelle est qu’il produit 150% plus d’efficacité énergétique.
Cette avance technologique, prouvée et mise à l’épreuve, est non seulement modulaire mais hiérarchisable. Un bond en avant semblable au passage du télégraphe au téléphone cellulaire. Les génératrices en usage dans l’industrie ne peuvent dans l’ensemble être réparées ou maintenues sur place. Ou bien on les remplace ou on doit les démonter et les retourner en usine pour une remise en état, causant des coûts d’opération importants, réduisant du même coup, leur efficacité. En contraste complet, les bobines de Magnetronic requièrent un processus simple de fabrication, sont entièrement modulaires, ne disposent d’aucune pièce métallique, peuvent être facilement être étalonnés à diverses puissances, et faire l’objet de réparation et/ou révision, même en opération.
Plusieurs avantages technologiques sont présents dans les moteurs Magnetronic. En plus d’être super efficaces, leurs coûts d’opération sont les plus bas par cheval-vapeur (HP/CV) jamais produits et leurs coûts et facilité de maintenance sont les plus économiques. Les domaines d’application de ce type de moteur sont illimitées, du gros camion puissant, voiture, bateau, avion et même la bicyclette électrique, et il inclut, la vaste gamme de tous les types de génératrices électrique.
Les moteurs générateurs Magnetronic sont des moteurs électriques multi-phases ; ils comprennent un stator muni d’une pluralité de bobines enfilées, entourés par un cœur non magnétisable ; un rotor à l’arbre de transmission équipé d’aimants permanents fixés à des endroits choisis, adjacent au stator, le rotor étant monté sur une axe rotatif ; une source de pouvoir ; un capteur de position étant connecté opérationnellement au rotor ; un circuit de contrôle connecté opérationnellement à la source de pouvoir, au capteur de position, et au bobines filées, afin de contrôler la distribution de l’énergie électrique vers les bobines. Le mécanisme de transfert de la charge électrique se fait d’une première bobine vers une seconde bobine.
Ce qui suit s’applique à l’ensemble des moteurs décrits plus bas. Tous ces moteurs ont l’unique caractéristique de pouvoir être conçus et construits en de multiples dimensions et capacité ; du petit outil motorisé d’un dentiste à une génératrice de plusieurs chevaux-vapeurs (CV/HP) géante. Les dimensions peuvent varier d’un moteur de la dimension d’une « paille », ou d’un diamètre moyen à un diamètre très grand. La grande flexibilité d’arrangement des groupes d’aimants nous permet de construire des génératrices de toutes sortes de dimensions et de pouvoir, incluant des moteurs à vitesse variables, à vitesse constante, à torque constant aussi bien que des positions spécifiques.
Notre technologie se caractérise par l’arrangement et le positionnement de ses groups d’aimants. Nous avons une capacité presque illimitée dans les applications qui requièrent un mouvement ou une réponse au mouvement.
Étant donné les coûts élevés de l’Énergie et le fait que cette ressource n’augmente pas, il existe un besoin réel pour la disponibilité d’une énergie efficace, tout particulièrement dans l’utilisation des moteur électriques pour les véhicules automobiles (sans batterie, donc sans pollution). Les moteurs électriques sont répandus partout sur cette planète, de sorte qu’une amélioration de leur pouvoir de production sans consommation de matière première signifie des économies importantes. Même si le moteur électrique remonte à quelque cent ans, (exemple Nicolas Tesla), ce n’est que tout récemment qu’ils ont pris conscience de la nécessité urgente d’abandonner les énergies fossiles. Une amélioration du pouvoir énergétique produit par un moteur magnétique pour les véhicules et autres applications, ne peut que les rendre encore plus accessibles.
Les moteurs électromagnétiques disposant de bobines sans cœur de métal ont été utilisés par le passé, comme par exemple dans l’application du type « pancake » mais dans des applications à faible énergie. Toutefois, des cœurs de moteurs construits avec un matériel non-magnétisable comme le plastique, n’ont jamais été utilisés pour des moteurs à haut rendement énergétique.
Une des moteurs à fonction Magnetronic, consiste en un moteur électrique multi-phase muni d’un stator qui comprend une pluralité de bobines enfilées entourées d’un cœur non-magnétisable ; un rotor équipé d’aimants permanents y est inséré, le rotor étant adjacent au stator, le rotor étant monté sur un axe horizontal rotatif ; une source d’alimentation ; un capteur de position opérationnellement connecté au rotor ; un circuit de contrôle opérationnellement connecté à la source d’alimentation, au capteur de position, aux bobines filées, pour contrôler la distribution de l‘énergie électrique en direction des bobines ; en conséquence le mécanisme de contrôle du transfert de la charge électrique se fait d’une première bobine vers une seconde bobine.
Dans une autre conception, le moteur générateur est conçu avec une méthode différente d’opération, qui inclut des étapes procurant au moteur électrique qui comprend : un stator incluant une pluralité de bobines filées entourées d’un cœur non-magnétisable et un rotor pivotant monté adjacent au stator avec une pluralité d’aimants permanents montés sur le rotor ; une source d’alimentation ; un capteur de position opérationnellement connecté au rotor et un circuit de contrôle opérationnellement connecté à la source d’alimentation, au capteur de position et aux bobines filées pour assurer le contrôle de la distribution de l’énergie électrique vers les bobines.
Cette précédente invention comprend de plus une méthode pour amener l’énergie électrique de la source d’alimentation, vers une première bobine qui connecte électriquement la première bobine à la seconde bobine, qui transfère l’énergie électrique de la première bobine vers la seconde sous l’action du contrôleur de circuit afin d’assurer la déconnection de la première bobine, de la source d’alimentation.
Dans encore une autre conception du moteur générateur d’électricité, il s’agit d’un moteur électrique multi-phase, qui comprend : un stator muni d’une pluralité de bobines filées à un cœur non-magnétisable, ce dernier muni d’un tube de plastique et un rotor muni d’aimants permanents. Le rotor étant installé adjacent au stator, il est monté sur un arbre de transmission rotatif. Il dispose d’une source d’alimentation, d’un capteur de position opérationnellement connecté au rotor via l’arbre de transmission rotatif. Le circuit de contrôle est opérationnellement connecté à la source d’alimentation, au capteur de position, et des bobines filées afin d’assurer le contrôle de la distribution de l’énergie électrique vers les bobines filées. Le circuit de contrôle transfère la charge électrique à partir d’une première bobine de décharge vers une seconde bobine de charge ; alors que le rotor dispose d’un disque équipé d’une paire de faces opposées ayant une bordure de circonférence marquée ; le rotor comprend en plus un coussinet de métal attaché tout près de la bordure de circonférence ; les aimants permanents comprennent une pièce de métal en sandwich entre deux aimants spécifiques, de façon à ce que au moins un aimant soit adjacent au stator.
De plus amples domaines d’application de cette invention vont devenir évidents suite aux descriptions des différentes variantes décrites ci-dessus. Les détails fournis le sont à titre d’exemples, et ne doivent en aucun cas limiter les possibilités et les dimensions possibles de ces générateurs d’énergie.
Claims
Un moteur électrique multi-phase comprenant : un stator muni d’une pluralité de bobines filées chacune entourée d’un cœur non-magnétisable ; muni d’au moins un rotor qui comprend des aimants permanents intégrés, le rotor étant disposé de façon adjacente au stator, le rotor étant monté sur un arbre de transmission rotatif ; une source d’alimentation ; un capteur de position opérationnellement connecté au rotor ; un circuit de contrôle opérationnellement connecté à la source d’alimentation, au capteur de position, et des bobines filées pour assurer le contrôle de la distribution du courant électrique en direction des bobines filées ; ainsi, le circuit de contrôle transfère la charge électrique d’une première bobine vers une seconde bobine.
Le moteur électrique multi-phase du claim 1, où la première bobine est une bobine de décharge.
Le moteur électrique multi-phase du claim 2, où la première bobine est une bobine de charge.
Le moteur électrique multi-phase du claim 1, où le rotor comprend un disque ayant une paire de faces opposées ayant une bordure de circonférence marquée et où ce disque est fabriqué d’un matériel non-magnétisable.
Le moteur électrique multi-phase du claim 1, où le rotor comprend un coussinet de métal attaché à une face près de la bordure de circonférence.
Le moteur électrique multi-phase du claim 1, où les aimants permanents comprennent une pièce de métal en sandwich entre deux aimants spécifiques, de telle façon à ce que au moins un des deux aimants soit adjacent au stator.
Le moteur électrique multi-phase du claim 1, où le capteur de position comprend au moins une des composantes suivantes : des contacts à ressorts activés par une came, des brosses, un distributeur magnétique, et un distributeur photoélectrique.
Le moteur électrique multi-phase du claim 1, où le capteur de position est opérationnellement connecté au rotor via l’arbre de transmission horizontal.
Le moteur électrique multi-phase du claim 1, où chaque bobine filée est enfilée d’un fil plat, qui le rend en position parallèle au plan de l’arbre de transmission horizontal du rotor.
Le moteur électrique multi-phase du claim 1, où, le cœur non-magnétisable comprend au moins une des composantes suivantes : un tube en plastique, une tige, et un noyau à air.
Le moteur électrique multi-phase du claim 1, comprenant en plus : un tube-entretoise creux en projection d’une face du rotor, l’espaceur étant monté au centre de rotation du rotor, en coaxial de l’arbre de transmission de rotation, l’espaceur encerclant l’arbre de transmission, de manière telle que l’espaceur maintienne une distance fixe du rotor et de tout autre rotor qui lui est adjacent.
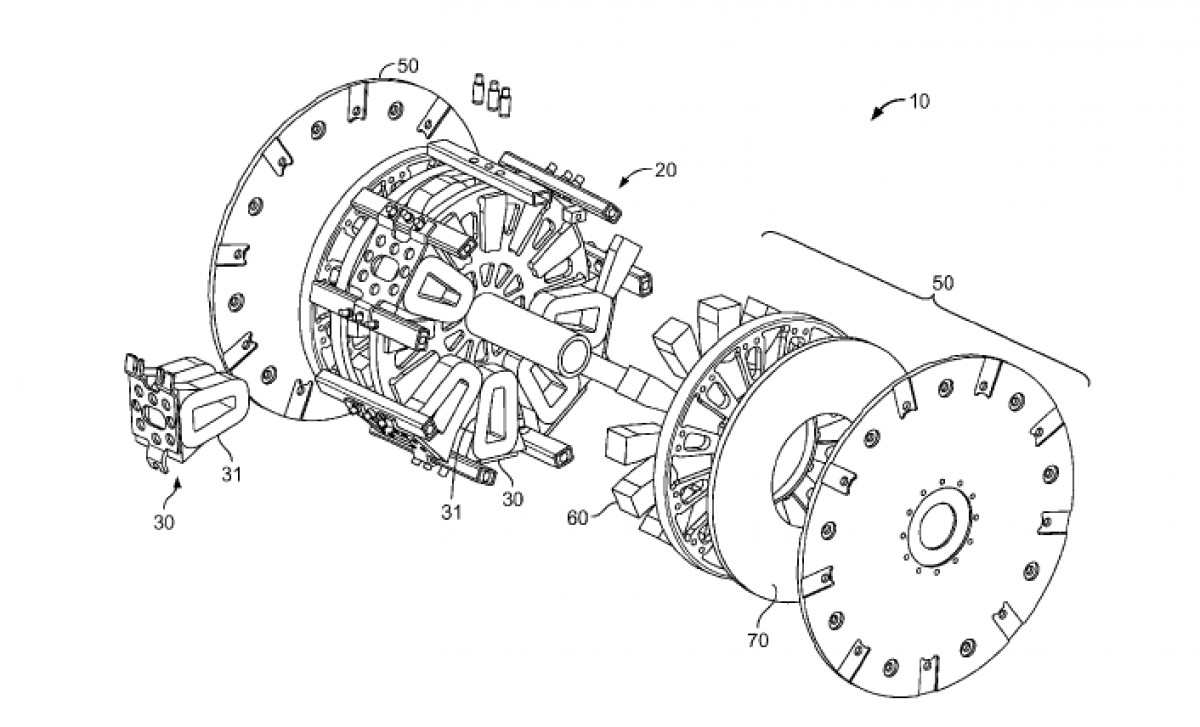
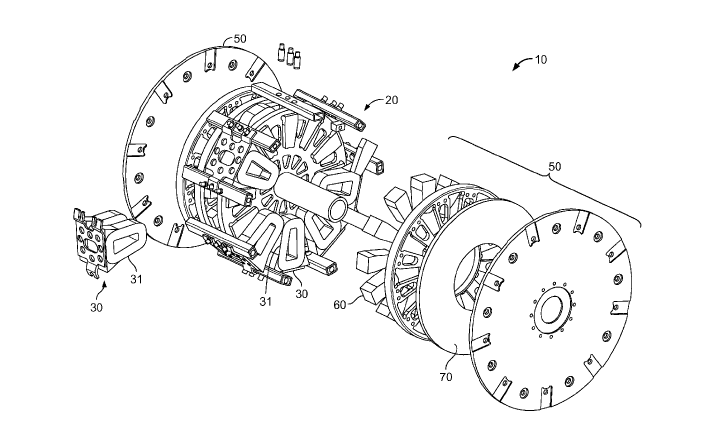
Le moteur électrique multi-phase du claim 1, comprenant en plus : un bâti structurel pour supporter le stator dans sa relation avec le rotor qui comprend une pluralité de strips longitudinales fixés et attachées à une paire de barrettes de connexion ; où l’arbre de transmission est supporté par les barrettes de connexion ; où les bobines filées du stator sont attachées aux strips longitudinales de façon à pouvoir facilement être détachées.
Le moteur électrique multi-phase du claim 1, où le stator comprend six (6) bobines et le rotor comprend huit (8) aimants permanents.
Un moteur électrique multi-phase, comprenant : un stator muni d’une pluralité de bobines filées chacune sur un cœur non-magnétisable, et où le cœur non-magnétisable comprend un tube de plastique ; un rotor muni d’aimants permanents intégrés, le rotor étant disposé de manière adjacente au stator, le rotor étant monté sur l’arbre de transmission de rotation ; une source d’alimentation ; un capteur de position opérationnellement connecté au rotor via l’arbre de transmission de rotation ; un circuit de contrôle opérationnellement connecté à la source d’alimentation, le capteur de position et les bobines filées, afin de contrôler la distribution de l’énergie électrique vers les bobines filées ; alors que le circuit de contrôle transfère la charge électrique d’une première bobine de décharge vers une seconde bobine de charge ; alors que le rotor dispose d’un disque équipé d’une paire de faces opposées ayant une bordure de circonférence marquée ; alors que le rotor comprend en plus un coussinet de métal attaché tout près de la bordure de circonférence ; et que les aimants permanents comprennent une pièce de métal en sandwich entre deux aimants spécifiques, de telle façon à ce que au moins un aimant soit adjacent au stator.
Le moteur électrique multi-phase du claim 14, où le capteur de position comprend au moins une des composantes suivantes : des contacts à ressorts activés par une came, des brosses, un distributeur photoélectrique.
Le moteur électrique multi-phase du claim 14, où le disque comprend au moins une des composantes suivantes : aluminium et la résine phénolique.
Le moteur électrique multi-phase du claim 15, où chaque bobine filée est enfilée d’un fil plat, qui le rend en position parallèle au plan de l’arbre de transmission horizontal du rotor.
Le moteur électrique multi-phase du claim 14, où le stator comprend six (6) bobines et le rotor comprend huit (8) aimants permanents.
Un moteur modulaire, multi-phase comprenant : un stator muni d’une pluralité de bobines filées entourant un cœur non-magnétisable ; au moins un rotor muni d’aimants permanents intégrés, le rotor étant disposé adjacent au stator, the rotor étant monté sur l’arbre de transmission rotatif ; un bâti structurel pour supporter le stator dans sa relation avec le stator relatif au rotor qui comprend une pluralité de strips longitudinales fixés et attachées à une paire de barrettes de connexion ; une source d’alimentation ; un capteur de position opérationnellement connecté au rotor ; un circuit de contrôle opérationnellement connecté à la source d’alimentation, au capteur de position et aux bobines filées, pour assurer le contrôle de la distribution de l’énergie électrique vers les bobines filées ; où l’arbre de transmission est supporté par les barrettes de connexion ; où les bobines filées du stator sont attachées aux strips longitudinales de façon à pouvoir facilement être détachées.
La Science du Magnetronic — Opération et Principes
Le système Magnetronic utilise des règles algorithmiques pour parvenir à des résultats remarquables dans la génération d’électricité, et la propulsion de l’arbre de transmission de son moteur. Des champs magnétiques circulent en direction de bobines inhibitrices de courant, qui rappellent les standards de l’industrie du transistor avec l’Effet de Hall. Le champ magnétique des aimants permanents sont utilisés pour limiter le courant dans les opérations des bobines filées. D’autres moteurs générateurs de courant, utilisent les champs électromagnétiques pour causer différents types d’effets. Les champs magnétiques de chaque aimant dans le groupe ajoutent au pouvoir de chaque aimant du système, en augmentant sa force effective.
Confinement des Champs Magnétiques. Les champs magnétiques sont contenus et redirigés pour limiter la perte d’énergie et augmenter la force disponible. La résonance recapture l’énergie qui n’est pas consommée par l’utilisation des circuits électroniques à haute vitesse pour saisir les « pertes par superposition des champs d’énergie » sans provoquer de perte calorique tel qu’on le retrouve dans les moteurs générateurs d’énergie standards, comme cause d’une perte significative d’énergie. Toutes les règles de base sont combinées afin de faire du moteur Magnetronic un appareil avantageux qui minimise la perte calorique, requiert une quantité minimum d’énergie de démarrage, offre une résistance minimale, demande moins d’énergie opérationnelle, et produit plus de pouvoir.
Un champ magnétique très fort est utilisé pour limiter le courant à travers les bobines. Initialisée de façon appropriée, cette règle réduit le courant et en même temps augmente la force énergétique dérivée du courant qui est poussé vers les bobines. La configuration du positionnement des aimants par rapport aux bobines, la force est maximisée et le courant est réduit. Le résultat est qu’on obtient alors une force de sortie par rapport au courant d’opération consommé.
L’addition de chaque nouvel aimant au circuit, ajoute de la force à chaque aimant, et la relation que chaque aimant entretient avec tous les autres aimants, limite le coulage entre les pôles et a pour effet de maintenir un alignement maximum qui augmente leur force de sortie. Une configuration précise et en parfait équilibre de balance élimine les pertes associées aux autres technologies.
Copyright Fulmina Foundation
Powered by Froala Editor